
Hybrid Pose Adjustment(hypa)数字孪生
机构:香港大学(HKU)
角色:博士后研究员
时间:2025.09 - 至今
该项目聚焦于为 hybrid Pose Adjustment(hypa)系统构建数字孪生,用于连接物理实验与虚拟模型,提升系统状态观测、控制策略验证与迭代开发效率。
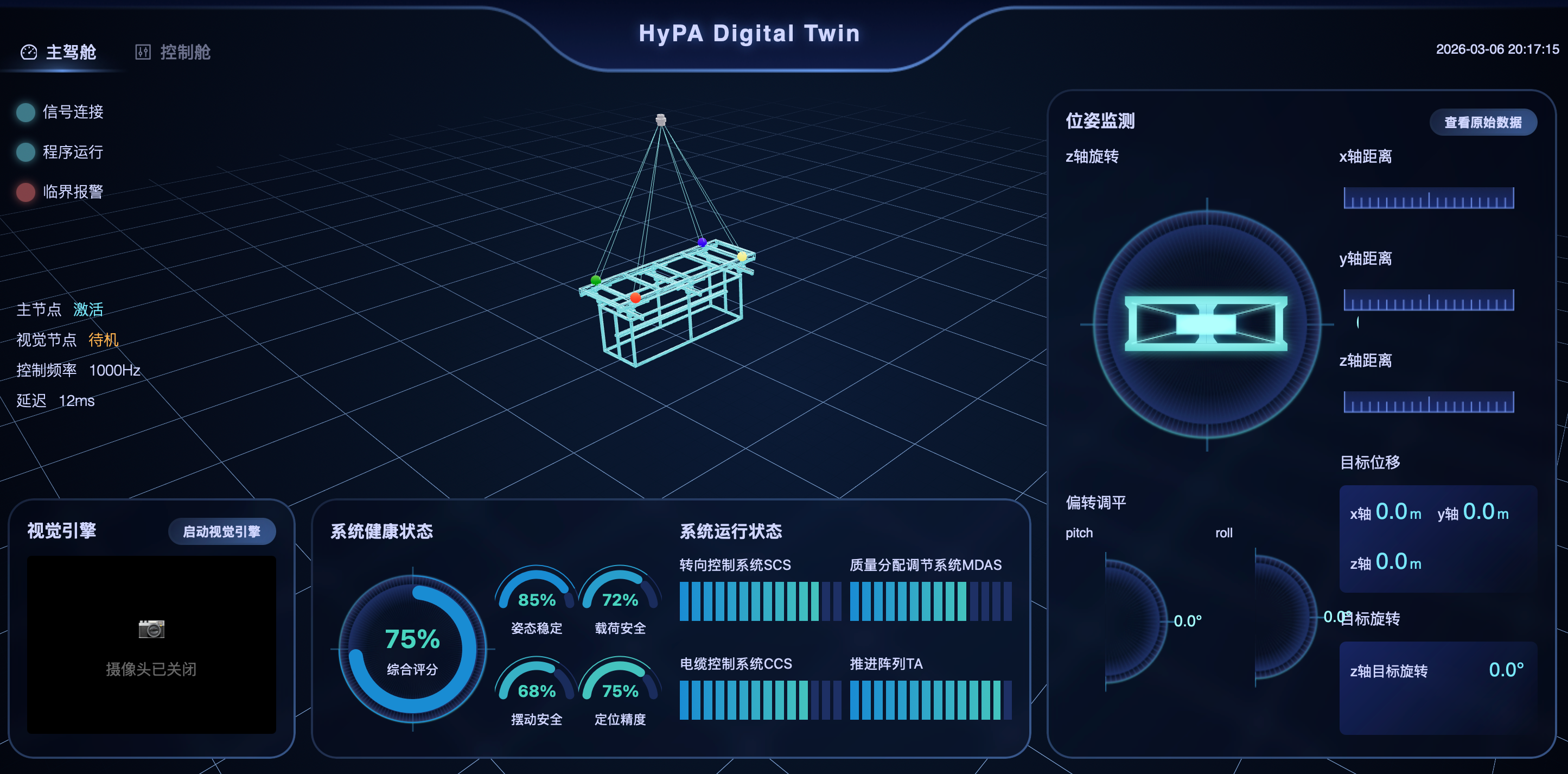
项目概述
- 构建
hypa系统的数字化映射,实现关键状态与行为的同步监测。 - 支持位姿调整与控制流程的仿真验证。
- 加强实物测试与虚拟分析之间的联系,加快开发迭代。
关键词
- 数字孪生
- 位姿调整
- 机器人系统建模
- 仿真验证