
Hi, I’m Wenshuo Li. I received my Ph.D. in Mechanical Engineering from Harbin Institute of Technology (Shenzhen) in 2024, and I am currently a Postdoctoral Fellow at The University of Hong Kong (HKU).
My current work focuses on robotic algorithm and control development for industrial scenarios, including:
- Kinematic and dynamic modeling of high-DOF manipulators
- Integrated force-position control and contact-aware manipulation
- Calibration and compensation methods for motion and force accuracy
- System-level validation from simulation to real hardware deployment

Advanced Robotics and Control Systems Design, including:
- Kinematics and dynamics, especially in redundant manipulators
- Dual-arm manipulation
- Control systems
- AI-driven in Robotics
- Robotic design, particularly for specialized environments
- Soft manipulators
🎓 Education
Ph.D. in Mechanical Engineering (2020–2024)
GPA: 3.6/4,![]() Harbin Institute of Technology, Shenzhen, China
Harbin Institute of Technology, Shenzhen, China
Ph.D. Thesis: Research on Integrated Force-Position-Shape Planning and Control Methods for High-Performance Cable-Driven Hyper-Redundant Manipulators, supervised by Prof. Wenfu Xu
M.Eng. in Mechanical Engineering (2017–2020)
GPA: 3.8/5,![]() Dalian Maritime University, Dalian, China
Dalian Maritime University, Dalian, China
M.Sc. Thesis: Kinematic Model and Experimental Study of Soft Manipulator Under Contact Constraints, supervised by Prof. Yinglong Chen
B.S. in Mechanical Engineering, specializing in Salvage Engineering (2012–2016)
GPA: 3.1/5,![]() Dalian Maritime University, Dalian, China
Dalian Maritime University, Dalian, China
Research Interests
I am passionate about advanced robotics and control systems design. My key areas of expertise include:
- Kinematics and Dynamics: Proficient in the theoretical foundations and applications of kinematics and dynamics in robotic systems, with a particular focus on high-performance, hyper-redundant manipulators.
- Control Systems: Skilled in developing advanced control algorithms for mechanical structures, aiming to enhance precision and efficiency in various task executions. My experience spans cable-driven and soft manipulators.
- Neural Networks in Robotics: Experienced in applying neural networks for modeling, compensation, and control within mechanical systems, which enhances predictability and response accuracy in robotics.
- Robotic Design for Special Environments: Adept in designing robots for challenging conditions, covering mechanical structure, sensor integration, and fundamental electrical control schematics.
🔥 News
- 2024.05: 🎉 One paper is accepted by Tmech
- 2024.01: 🎉 One paper is accepted by ICRA 2024
- 2024.03: 🎉 One paper is accepted by TII
- 2023.09: 🎉 One paper is accepted by RA-L
- 2023.03: 🎉 One paper is accepted by Tmech
📖 Publications
📝 Paper
Journal
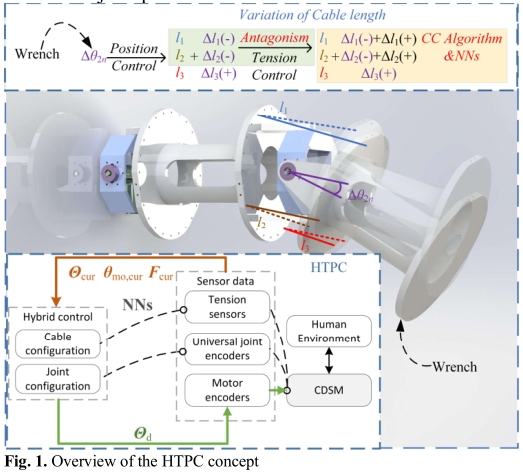
Hybrid Tension-Position Control
Bin Liang, Wenshuo Li*, Boyang Lin, Lei Yan, Xueqian Wang, Wenfu Xu*, “Hybrid Tension-Position Control of Cable-Driven Serial Manipulator to Improve Accuracy and Avoid Cable Slack and Breakage,” in IEEE/ASME Transactions on Mechatronics, Accept.
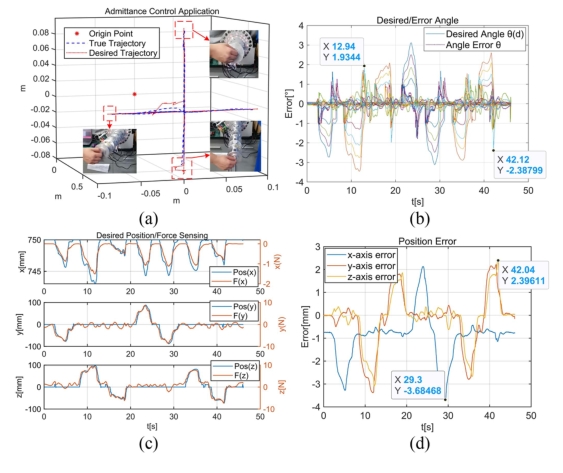
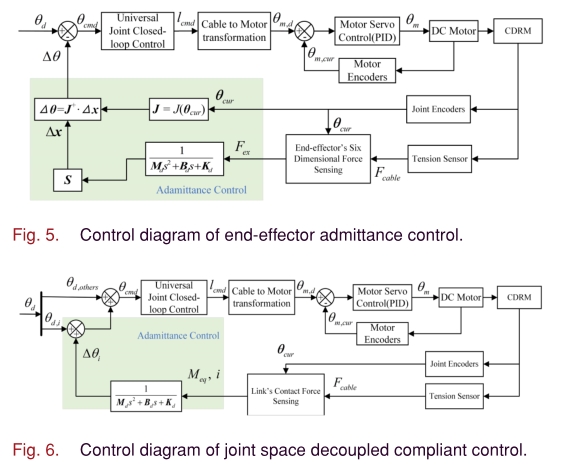
Force Sensing and Compliance Control
Wenshuo Li, Xi Huang, Lei Yan, Hongyang Cheng, Bin Liang, and Wenfu Xu, “Force Sensing and Compliance Control for a Cable-Driven Redundant Manipulator,” in IEEE/ASME Transactions on Mechatronics, vol. 29, 2024.
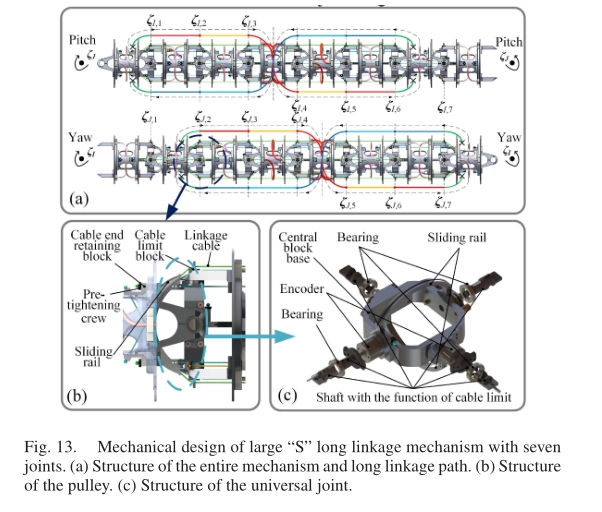
Composite Linkage Mechanism
Junxiang Li, Wenfu Xu, Wenshuo Li, Lei Yan*, Bin Liang*, “Design and Development of Composite Linkage Mechanism for Cable-Driven Segmented Manipulator to Increase Synchronous Accuracy and Transmission Distance,” in IEEE Robotics and Automation Letters, vol. 29, 2023.
Ex-Situ 6-axis Sensing Method
Boyang Lin, Wenfu Xu, Wenshuo Li, Han Yuan*, and Bin Liang*, “Ex-Situ Sensing Method for the End-Effector’s Six-Dimensional Force and Link’s Contact Force of Cable-Driven Redundant Manipulators,” in IEEE Transactions on Industrial Informatics, vol. 20, 2024.
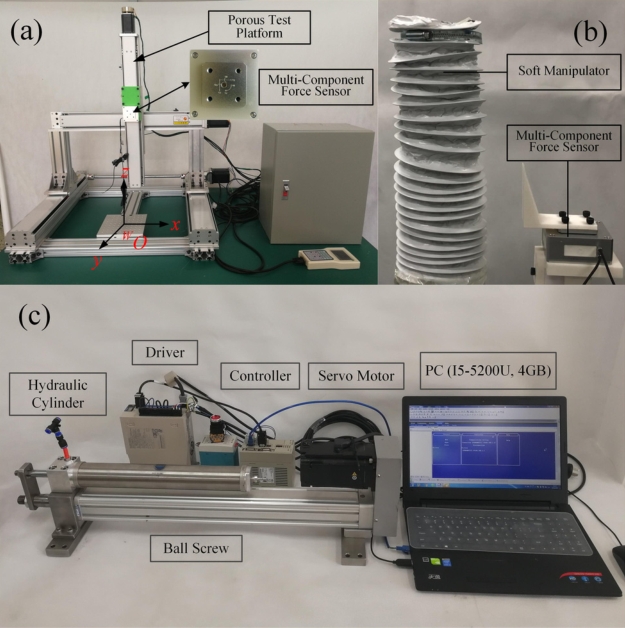
Statics of soft manipulator under contact environment
Yinglong Chen, Wenshuo Li, Yongjun Gong, “Static modeling and analysis of soft manipulator considering environment contact based on segmented constant curvature method,” in Industrial Robot: the international journal of robotics research and application, 2020.
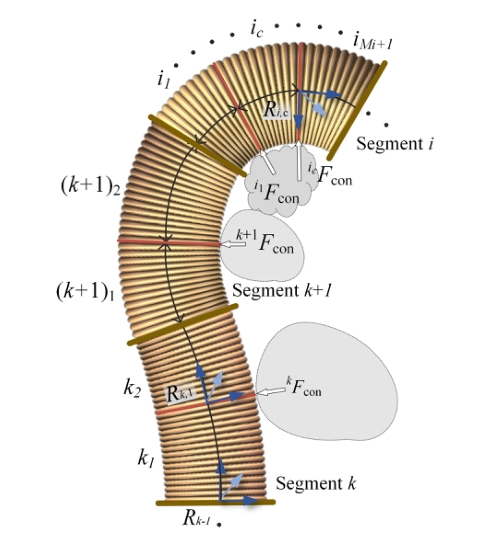
Kinematics of soft manipulator under contact environment
YingLong Chen, WenShuo Li, Qiang Guo, YongJun Gong, “Kinematics modeling of soft manipulator interacting with environment using segmented variable curvature method,” International Journal of Control, Automation and Systems, vol. 20, 2022.
🗨️ Conferences
- 2024.5, ICRA2024
- 2023.12, ROBIO2023
- 2022.12, ROBIO2022
Chinese journal paper
- 基于Neo-Hookean模型的软体机械臂变曲率运动学建模研究. 组合机床与自动化加工技术, 2020, 0(12): 31-34
Patents
Chinese Patents
- 徐文福, 黄曦,
李文朔, 袁晗, 梁斌 . 绳驱柔性机械臂的闭环运动控制方法及系统. [website]
🎖 Honors and Awards
-
2024 BYD scholarship
Awarded annually for outstanding engineering performance and hands-on project experience -
2024 RAS Travel Grant
2024 IEEE International Conference on Robotics and Automation -
2021 Guangdong Youth May Fourth Medal
Recognized as an outstanding member of the awarded collective -
2020–2024 Doctoral Scholarship
Awarded annually for outstanding academic performance and research contributions -
2019 SMC Enterprise Scholarship
Awarded for academic excellence -
2017–2020 Master’s Scholarship
Granted to the top 10% of the graduate student body -
2012–2016 Undergraduate Scholarship
Received consecutively for ranking in the top 30% of the class each year -
2015 Dalian City Star Volunteer
Recognized for outstanding volunteer service
💻 Internship and work
- 2025.09 - Present, The University of Hong Kong (HKU), Postdoctoral Fellow
Conducting research on advanced robotics and control, including modeling, planning, and control for high-performance robotic manipulation systems. - 2024.07 - 2025.07, BYD, Senior Algorithm Engineer
Robotics algorithm development for industrial applications, including manipulation planning, integrated force/motion control, and engineering deployment. - 2019.07 - 2019.08, Midea, Algorithm/Engineering Intern
Participated in motion-control related engineering tasks and prototype validation. - 2015.02 - 2019.06, BYD, Mechanical/Engineering Internship Experience
Supported product-oriented engineering work, building practical experience across mechanical systems and industrial development workflow.