
Digital Twin for Hybrid Pose Adjustment (hypa)
Institution: The University of Hong Kong (HKU)
Role: Postdoctoral Fellow
Period: 2025.09 - Present
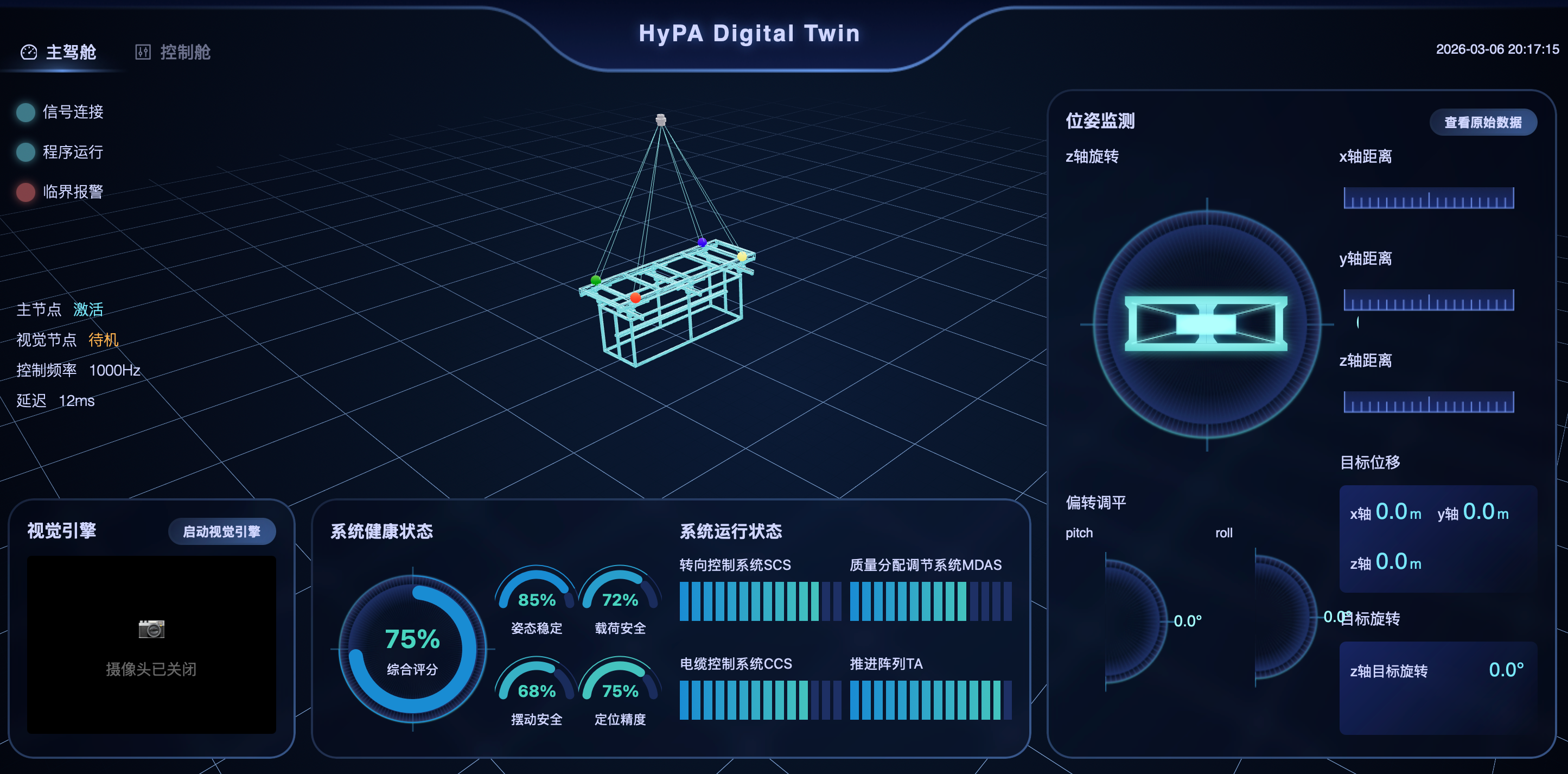
This project focuses on building a digital twin for the hybrid Pose Adjustment (hypa) system. The twin is used to connect physical experiments with virtual models, making it easier to observe system states, validate control strategies, and support iterative development.
Overview
- Built a digital representation of the
hypasystem for synchronized monitoring of key states and behaviors. - Supported simulation-based validation for pose adjustment and control workflows.
- Improved the connection between physical testing and virtual analysis for faster development cycles.
Keywords
- Digital twin
- Pose adjustment
- Robotics system modeling
- Simulation validation